ECTC係列通用機(jī)械手控製係統(tǒng)�,產(chǎn)(chan) 品支持1-16軸。機(jī)器設(shè)定電機(jī)參數(shù)相關(guān)(guan) 類(lèi)別內(nèi)(nei) 容如下:

編碼器類(lèi)型:增量���、步進(jìn)����、絕對(duì)值��、光柵尺�����、旋轉(zhuǎn)編碼器。
電機(jī)映射:填入伺服ID����,將邏輯軸與(yu) 物理軸對(duì)應(yīng)。
軸類(lèi)型:軸類(lèi)型分為(wei) 旋轉(zhuǎn)�、直線(xiàn)和旋轉(zhuǎn)清零三種。
每圈脈衝(chong) 數(shù):設(shè)定伺服電機(jī)每轉(zhuǎn)一圈發(fā)多少個(gè)(ge) 脈衝(chong) ���。
每轉(zhuǎn)距離:設(shè)定各伺服軸電機(jī)每轉(zhuǎn)一圈運(yùn)行的距離����。點(diǎn)擊電機(jī)正轉(zhuǎn)����,量取對(duì)應(yīng)軸實(shí)際運(yùn)行的距離,該距離即該軸電機(jī)旋轉(zhuǎn)一圈運(yùn)行的距離�����。
正極限:軸移動(dòng)的最大距離����。
負(fù)極限:軸移動(dòng)的最小距離���。
正極限點(diǎn):此項(xiàng)可自行定義(yi) X軸的正極限的點(diǎn),默認(rèn)為(wei) 常閉點(diǎn)���,勾選表示設(shè)置為(wei) 常開(kāi)點(diǎn)����。
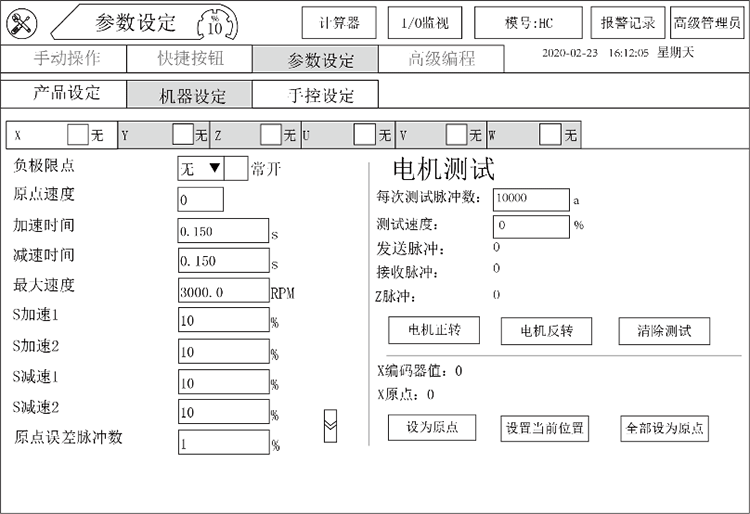
負(fù)極限點(diǎn):此項(xiàng)可自行定義(yi) X軸的負(fù)極限的點(diǎn)���,默認(rèn)為(wei) 常閉點(diǎn)�����,勾選表示設(shè)置為(wei) 長(zhǎng)開(kāi)點(diǎn)。
原點(diǎn)速度:設(shè)置回原點(diǎn)時(shí)速度大小��。
加速時(shí)間:設(shè)定伺服電機(jī)的加速時(shí)間�。
減速時(shí)間:設(shè)定伺服電機(jī)的減速時(shí)間。
最大速度:設(shè)定伺服電機(jī)的最大運(yùn)行速度�。
S加速1:第1段變“加速段”,此段另外篇幅介紹��。
S加速2:第3段變“加速段”��,此段另外篇幅介紹。
S減速1:第5段變“減速段”����,此段另外篇幅介紹。
S減速2:第7段變“減速段”���,此段另外篇幅介紹�。
原點(diǎn)誤差脈衝(chong) 數(shù):回原點(diǎn)時(shí)所允許的誤差脈衝(chong) 數(shù)����。
電機(jī)測(cè)試:
每次測(cè)試脈衝(chong) 數(shù):電機(jī)測(cè)試時(shí)每次發(fā)送的脈衝(chong) 數(shù)。
測(cè)試速度:設(shè)置電機(jī)進(jìn)行電機(jī)正反轉(zhuǎn)測(cè)試的速度��。
發(fā)送脈衝(chong) :每次發(fā)送的脈衝(chong) 數(shù)��。
接收脈衝(chong) :每次接收的脈衝(chong) 數(shù)���。
Z脈衝(chong) :電機(jī)的單圈位置���。
電機(jī)方向:電機(jī)方向分為(wei) 正轉(zhuǎn)和反轉(zhuǎn)兩(liang) 種。
電機(jī)正轉(zhuǎn):進(jìn)行電機(jī)正轉(zhuǎn)測(cè)試�����,測(cè)試顯示10000,反饋顯示10000����,表示測(cè)試成功,該軸正常�����。
電機(jī)反轉(zhuǎn):進(jìn)行電機(jī)反轉(zhuǎn)測(cè)試�����,測(cè)試顯示-10000����,反饋顯示-10000,表示測(cè)試成功�����,該軸正常�。
清除測(cè)試:清除電機(jī)正反轉(zhuǎn)測(cè)試數(shù)據(jù)��。
編碼器值:當(dāng)前編碼器值��。
設(shè)為(wei) 原點(diǎn):把單個(gè)(ge) 軸移動(dòng)至原點(diǎn)然後點(diǎn)設(shè)為(wei) 原點(diǎn)。
全部設(shè)為(wei) 原點(diǎn):把所有軸移動(dòng)至原點(diǎn)然後點(diǎn)全部設(shè)為(wei) 原點(diǎn)���。
原點(diǎn)位置:係統(tǒng)當(dāng)前原點(diǎn)位置的編碼器多圈值或單圈值��。



