工業(yè)(ye) 機器人控製係統(tǒng)的路徑引用地址��,係統(tǒng)為(wei) yl34511线路中心工控係列關(guān)(guan) 節(jié)機器人係統(tǒng)����,路徑引用界麵為(wei) 機器人控製器的擴展功能����。進入界麵如下:
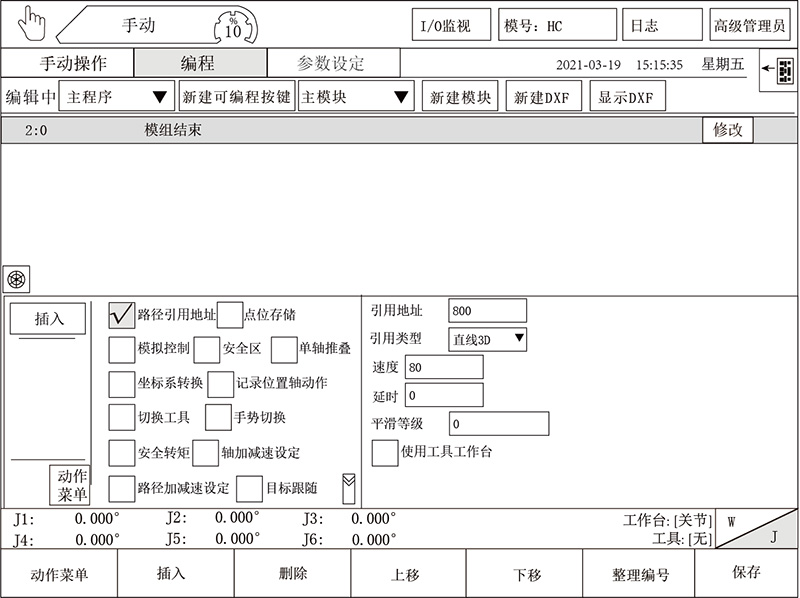
路徑引用地址功能主要是通過引用地址的方式來走路徑。使用此功能需要同時使用數(shù)據(jù)指令功能先定義(yi) 地址並給地址進行賦值�����。
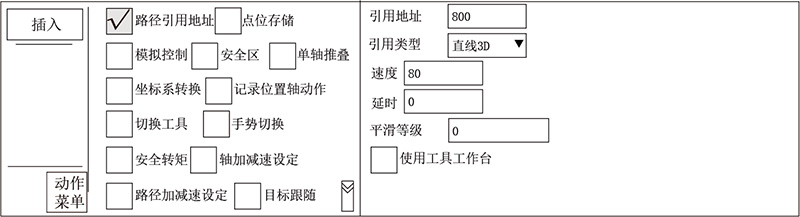
引用地址:可引用800-890的地址。
引用類型:可引用的路徑類型為(wei) 直線3D����、姿勢直線、自由路徑��、相對姿勢直線四種����。
直線3D:隻使用XYZ軸走直線,若引用地址處為(wei) 800��,則默認800地址裏的內(nèi)(nei) 容賦值給X軸��,801地址裏的內(nèi)(nei) 容賦值給Y軸����,802地址裏的內(nèi)(nei) 容賦值給Z軸。
姿勢直線:使用XYZUVW六個(ge) 軸走姿勢直線���,若引用地址處為(wei) 800���,則默認800地址裏的內(nèi)(nei) 容賦值給X軸�,801地址裏的內(nèi)(nei) 容賦值給Y軸�����,802地址裏的內(nèi)(nei) 容賦值給Z軸�,803地址裏的內(nèi)(nei) 容賦值給U軸����,804地址裏的內(nèi)(nei) 容賦值給V軸,805地址裏的內(nèi)(nei) 容賦值給W軸����。
自由路徑:使用XYZUVW六個(ge) 軸走自由路徑,若引用地址處為(wei) 800����,則默認800地址裏的內(nèi)(nei) 容賦值給X軸,801地址裏的內(nèi)(nei) 容賦值給Y軸����,802地址裏的內(nèi)(nei) 容賦值給Z軸,803地址裏的內(nèi)(nei) 容賦值給U軸�,804地址裏的內(nèi)(nei) 容賦值給V軸,805地址裏的內(nèi)(nei) 容賦值給W軸。
相對姿勢直線:使用XYZUVW六個(ge) 軸走相對姿勢直線�,若引用地址處為(wei) 800,則默認800地址裏的內(nèi)(nei) 容賦值給X軸偏移�,801地址裏的內(nèi)(nei) 容賦值給Y軸偏移,802地址裏的內(nèi)(nei) 容賦值給Z軸偏移�����,803地址裏的內(nèi)(nei) 容賦值給U軸����,804地址裏的內(nèi)(nei) 容賦值給V軸,805地址裏的內(nèi)(nei) 容賦值給W軸���。



