機械手在工業(yè)(ye) 上的應(yīng)用是很多的���,那麼(me) 機械手控製係統(tǒng)的組成和控製方式是什麼(me) 呢�?相信很多人會(hui) 有這樣的疑問吧,下麵就來給大家介紹一下機械手控製係統(tǒng)的組成和控製方式吧�!
工業(yè)(ye) 機械手的控製係統(tǒng)主要由主控計算機和關(guān)(guan) 節(jié)伺服控製器組成,主控計算機主要根據(jù)作業(yè)(ye) 要求完成編程���,並發(fā)出指令控製各伺服驅(qū)動裝置使各桿件協(xié)調(diào)工作�����。關(guān)(guan) 節(jié)伺服控製器用於(yu) 實現(xiàn)驅(qū)動單元的伺服控製,軌跡插補計算�����,以及係統(tǒng)狀態(tài)監(jiān)測�。
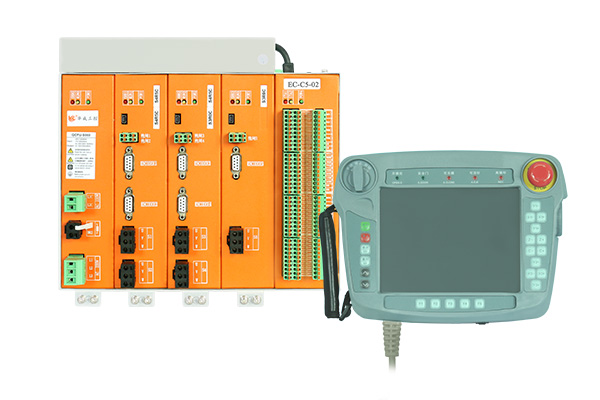
五軸機械手控製係統(tǒng)-衝(chong) 壓機械手係統(tǒng)應(yīng)用
機械手的測量單元一般為(wei) 安裝在執(zhí)行部件中的位置檢測元件(如光電編碼器)和速度檢測元件(如測速電機)。這些檢測量反饋到控製器中或者用於(yu) 閉環(huán)控製��、監(jiān)測�、進行示教操作。人機接口除了包括一般的計算機鍵盤�����、鼠標外����,通常還包括手持控製器(示教盒)通過手持控製器可以對機械手進行控製和示教操作�。
工業(yè)(ye) 機械手通常具有示教再現(xiàn)和位置控製兩(liang) 種方式��。示教再現(xiàn)控製就是操作人員通過示教裝置把作業(yè)(ye) 程序內(nèi)(nei) 容編製成程序����,輸入記憶裝置中,在外部給出啟動合令後����,機械手從(cong) 記憶裝置中讀出信息並送到控製裝置,發(fā)出控製信號�����,由驅(qū)動機構(gòu)業(yè)(ye) 機械手與(yu) 一般自動化機機械手的運動�����,在一定精度範(fàn)圍內(nèi)(nei) ���。
按照記憶裝置中的內(nèi)(nei) 容完成給定的動作���。實質(zhì)上�����,工業(yè)(ye) 機械手與(yu) 一般自動化機械的最大區(qū)別就是它具有“示教”再現(xiàn)“功能�����,因而表麵出通用�、靈活的“柔性”特點�����。
工業(yè)(ye) 機械手的位置控製方式有點位控製和連續(xù)路徑控製兩(liang) 種����。其中����,點位控製方式隻關(guān)(guan) 心機械手末端執(zhí)行的起點和終點位置,而不關(guān)(guan) 心這兩(liang) 點之間的運動軌跡����,這種控製方式或完成無障礙條件下的點焊、上下料�����、搬運等操作。連續(xù)路徑控製方式不僅(jin) 要求機械手以一定的精度達到目標點�����,而且對移動軌跡也有一定的精度要求�,如機械手噴漆、弧焊點操作����。實質(zhì)上這種控製方式是以點位控製方式為(wei) 基礎(chǔ),在第兩(liang) 點之間有滿足精度要求的位置軌跡插補算法實現(xiàn)軌跡連續(xù)化的�����。
以上就是關(guān)(guan) 於(yu) 機械手控製係統(tǒng)控製方式和組成的介紹了���,希望能幫助到大家��,想了解更多行業(yè)(ye) 資訊����,可以關(guān)(guan) 注我們(men) 的網(wǎng)站。如果還有什麼(me) 疑問���,或者需要這方麵的業(yè)(ye) 務(wù)�����,歡迎致電聯(lián)係我們(men) ���!



