yl34511线路中心機械手控製係統(tǒng)——伺服電機的PI參數(shù)怎麼(me) 進行調(diào)試?首先先記著這一段口訣:
參數(shù)整定找最佳�����,從(cong) 小到大順序查���;
先是比例後積分,最後再把微分加�����;
曲線震蕩很頻繁�����,比例度盤要放大;
曲線漂浮繞大彎���,比例度盤往小扳���;
曲線偏離回複慢,積分時間往下降���;
曲線波動周期長�,積分時間再加長���;
曲線震蕩頻率快�����,先把微分降下來��;
動差大來波動慢��,微分時間應(yīng)加長��;
理想曲線兩(liang) 個(ge) 波��,前高後低四比一����;
一看二調(diào)多分析,調(diào)節(jié)質(zhì)量不會(hui) 低�。
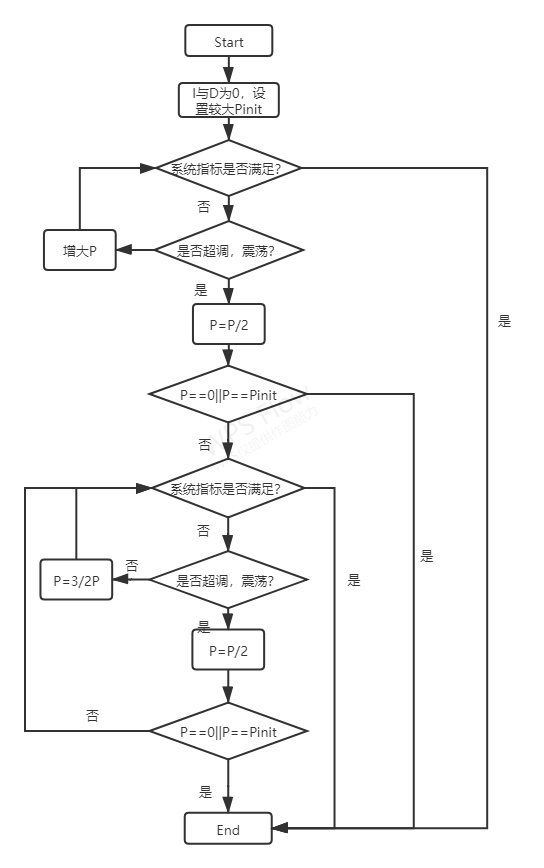
調(diào)試方法一:PID調(diào)節(jié)規(guī)則
1. 清除參,增P��,使輸出最短時間內(nèi)(nei) 達到期望值�。
2. 係統(tǒng)震蕩,P值調(diào)節(jié)大了���,應(yīng)較減小P值����,直到振蕩消失�����;調(diào)節(jié)完P(guān)後�,你的係統(tǒng)的實際值也許會(hui) 稍大於(yu) 或小於(yu) 你的期望值(可看作穩(wěn)態(tài)誤差) �,不用擔心,下麵的步驟會(hui) 修複這點��。
3. 緩慢的增加I值直到你的誤差消失為(wei) 止�����。如果你的輸出讓係統(tǒng)開始振蕩了,可試著緩慢減小I值�。
4. 如果你感到你的係統(tǒng)對誤差的反應(yīng)滯後了,你應(yīng)該緩慢增加D值���。 如果你的係統(tǒng)開始出現(xiàn)高頻振蕩了���,這意味你有一個(ge) 過大的D值放大了噪聲導(dǎo)致的,這時你該適當?shù)臏p小D值�。如果你的係統(tǒng)有較大的噪聲,最好保持D值為(wei) 0值�。(忽略)
5. 最後注意你的Limits值。
調(diào)試方法二:二分法
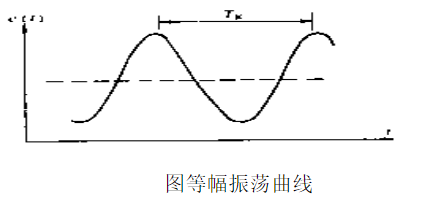
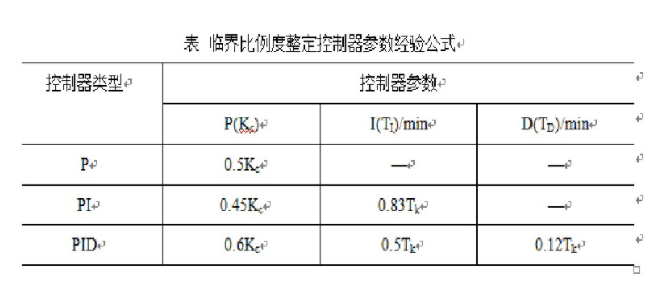
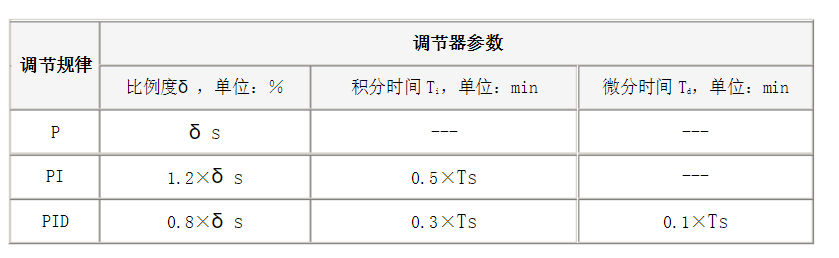
調(diào)試方法三:臨(lin) 界比例法
臨(lin) 界比例帶法又稱邊界穩(wěn)定法�����,其要點是將調(diào)節(jié)器設(shè)置成純比例作用���,將係統(tǒng)投入自動運行並將比例帶由大到小改變���,直到係統(tǒng)產(chǎn)(chan) 生等幅振蕩為(wei) 止。這時控製係統(tǒng)處於(yu) 邊界穩(wěn)定狀態(tài)���,記下此狀態(tài)下的比例帶值��,即臨(lin) 界比例帶KP以及振蕩周期KT���,然後根據(jù)經(jīng)驗公式計算出調(diào)節(jié)器的各個(ge) 參數(shù)��?�?梢钥闯雠R(lin) 界比例帶法無需知道對象的動態(tài)特性���,直接在閉環(huán)係統(tǒng)中進行參數(shù)整定。
調(diào)試方法四:衰減法
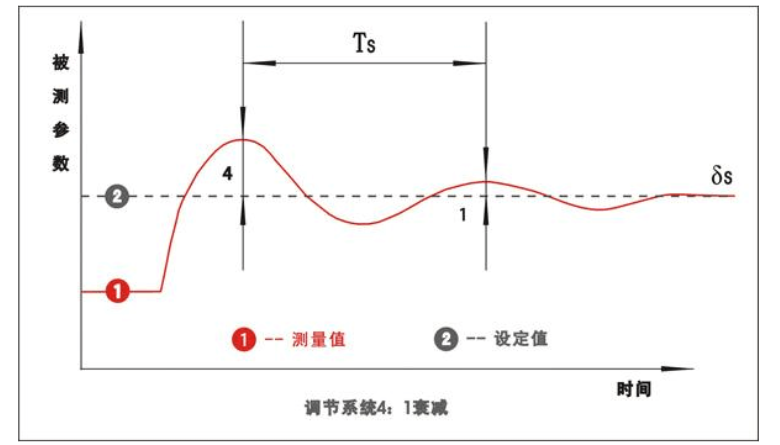
衰減曲線法是在總結(jié)臨(lin) 界比例帶法基礎(chǔ)上發(fā)展起來的�����,它是利用比例作用下產(chǎn)(chan) 生的4:1衰減振蕩(Ψ=0.75)過程時的調(diào)節(jié)器比例帶?���,及過程衰減周期Ts����,據(jù)經(jīng)驗公式計算出調(diào)節(jié)器的各個(ge) 參數(shù)�����。
衰減曲線法的具體(ti) 步驟是:
(1)置調(diào)節(jié)器的積分時間Ti→∞��,微分時間Td→0����,比例帶?為(wei) 一稍大的值;將係統(tǒng)投入閉環(huán)運行��。
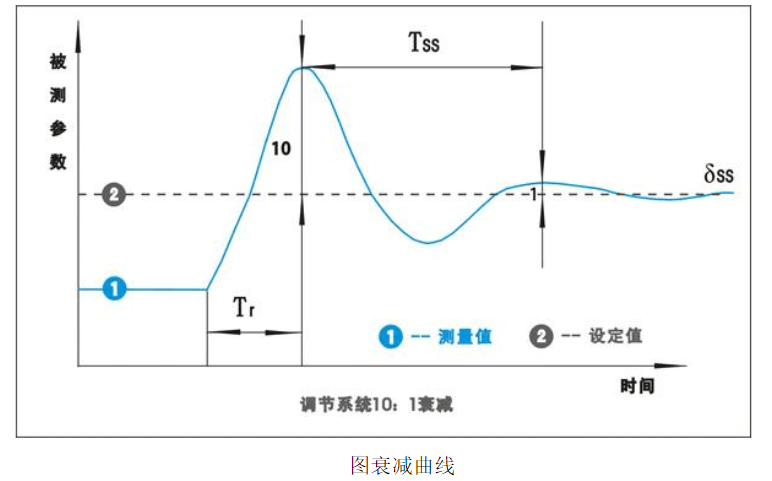
(2)在係統(tǒng)處於(yu) 穩(wěn)定狀態(tài)後作階躍擾動試驗����,觀察控製過程。如果過渡過程衰減率大於(yu) 0.75����,應(yīng)逐步減小比例帶值,並再次試驗�,直到過渡過程曲線出現(xiàn)4:1的衰減過程。記錄下4:1的衰減振蕩過程曲線���,如圖所示的曲線上求取Ψ=0.75時的振蕩周期Ts結(jié)合此過程下的調(diào)節(jié)器比例帶?s�����,按表計算出調(diào)節(jié)器的各個(ge) 參數(shù)�����。
(3)按計算結(jié)構(gòu)設(shè)置好調(diào)節(jié)器的各個(ge) 參數(shù)�,作階躍擾動試驗,觀察調(diào)節(jié)過程���,適當修改調(diào)節(jié)器參數(shù)���,到滿意為(wei) 止。
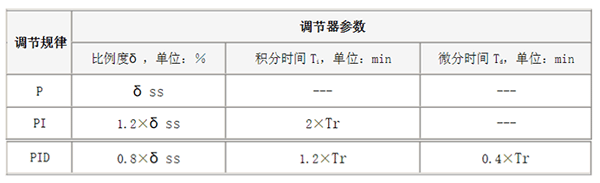
衰減曲線法PID參數(shù)整定經(jīng)驗公式
衰減曲線法PID參數(shù)整定經(jīng)驗公式
高壓伺服調(diào)試方法
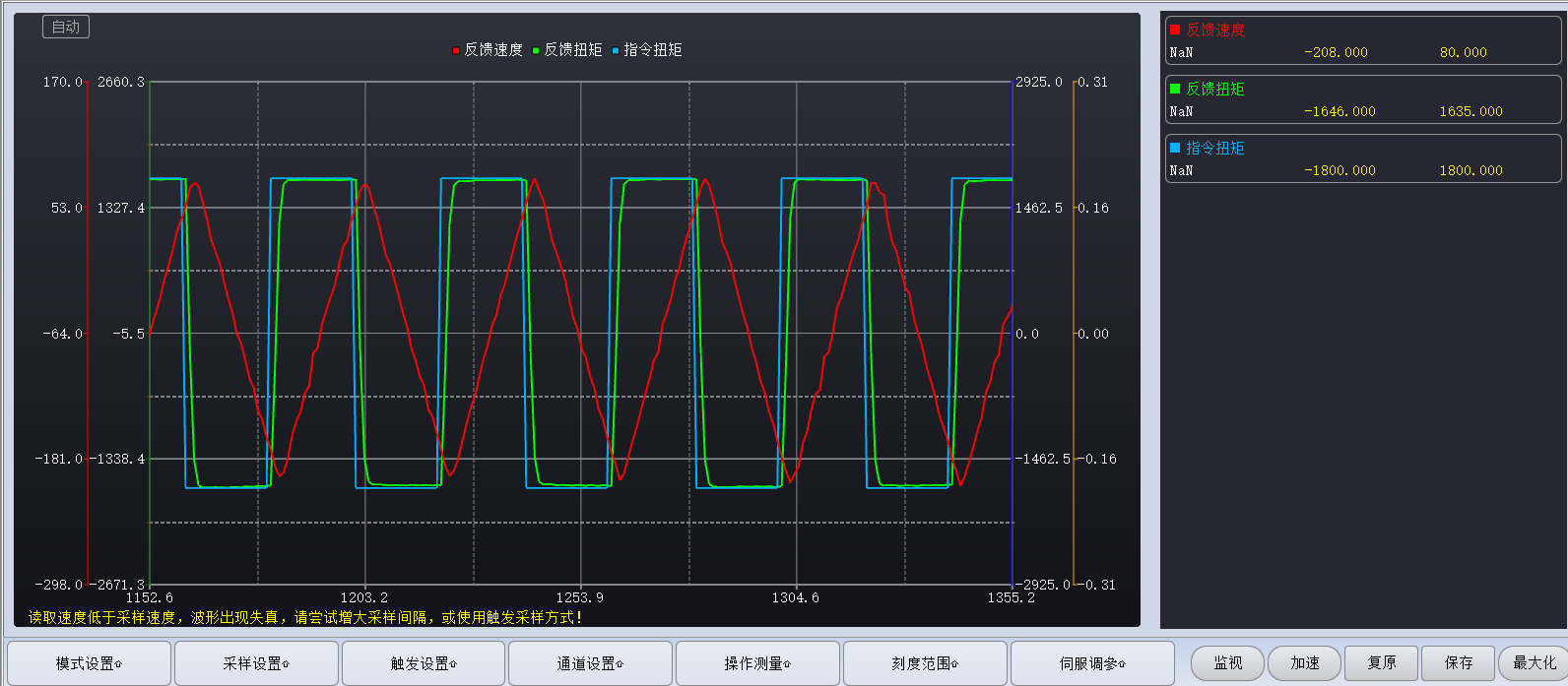
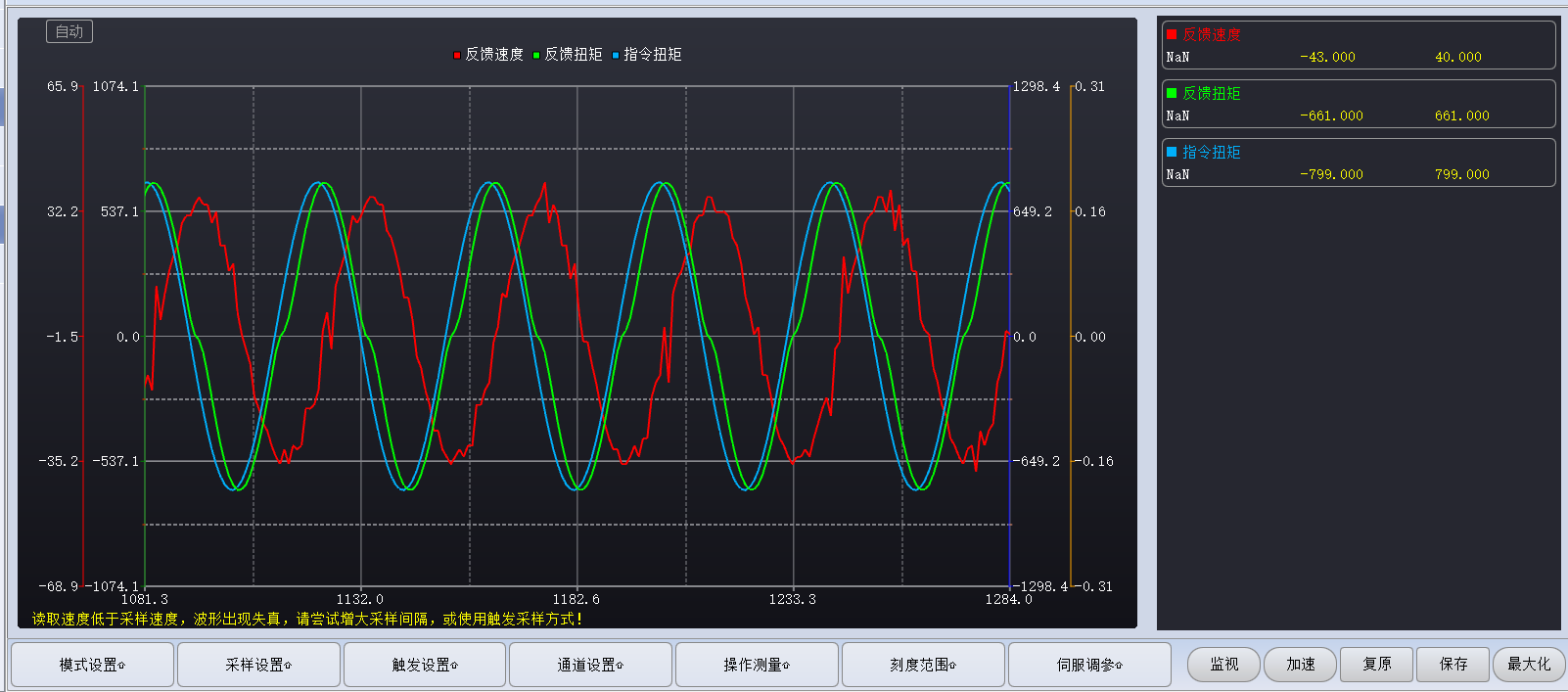
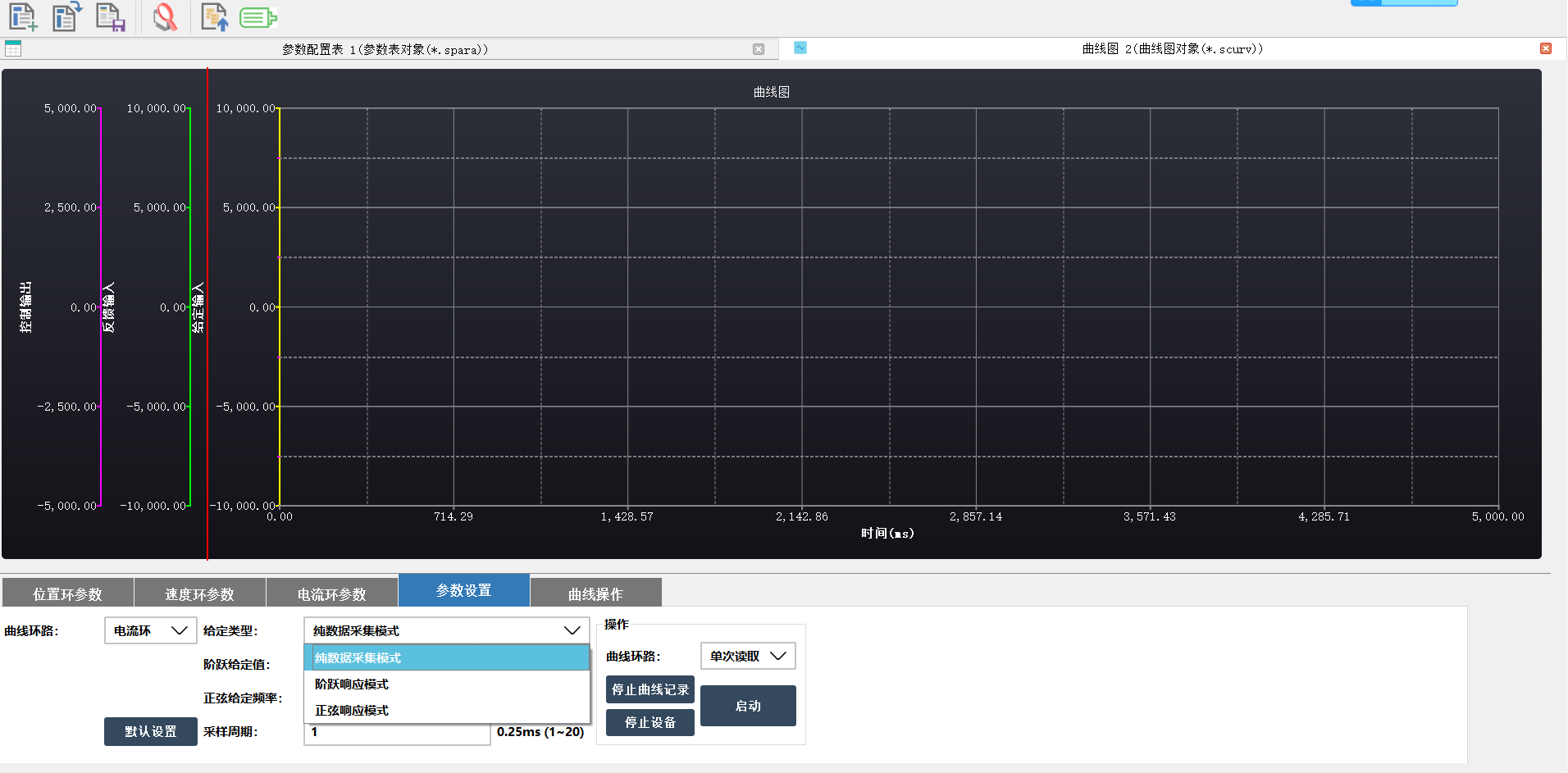
正弦響應(yīng):去使能後�����,將Pn10伺服模式設(shè)置為(wei) 3���,Pn61=100為(wei) 轉(zhuǎn)矩指令頻率�����,使能�����。調(diào)節(jié)Pn65���,Pn66,同時將Pn82寫(xie) 入1�,觀察波形,要求反饋不能超調(diào)�����,要求反饋不能滯後指令太多����。指令幅值±800,反饋幅值不能小於(yu) ±600���。
階躍響應(yīng):去使能後��,將Pn10伺服模式設(shè)置為(wei) 4�����,Pn61=100為(wei) 轉(zhuǎn)矩指令頻率�,使能�。利用正弦響應(yīng)得到的Pn65�,Pn66�����,進行階躍響應(yīng)�����,觀察波形�����,要求反饋不能超調(diào)���,要求反饋不能滯後指令太多�。指令幅值±1800�����,反饋幅值不能小於(yu) ±1600�����。
低壓伺服調(diào)試方法
將Pn282寫(xie) 入16384可以更改電流環(huán)比例增益Pn18����,電流環(huán)積分時間常數(shù)Pn19����。速度環(huán)比例增益Pn21����,速度環(huán)積分時間常數(shù)Pn22�����。
前饋補償(chang) 調(diào)整:
調(diào)整速度前饋增益Pn28����,值為(wei) 0-100%
調(diào)節(jié)方法:二分法。
陷波濾波調(diào)整:
將Pn03寫(xie) 入1���,Pn72--陷波濾波頻率���,Pn73--陷波濾波頻寬,
調(diào)節(jié)方法:二分法調(diào)整
先設(shè)置Pn73��,給個(ge) 200
開始二分法調(diào)整Pn72
直至控製電機不振蕩����。



