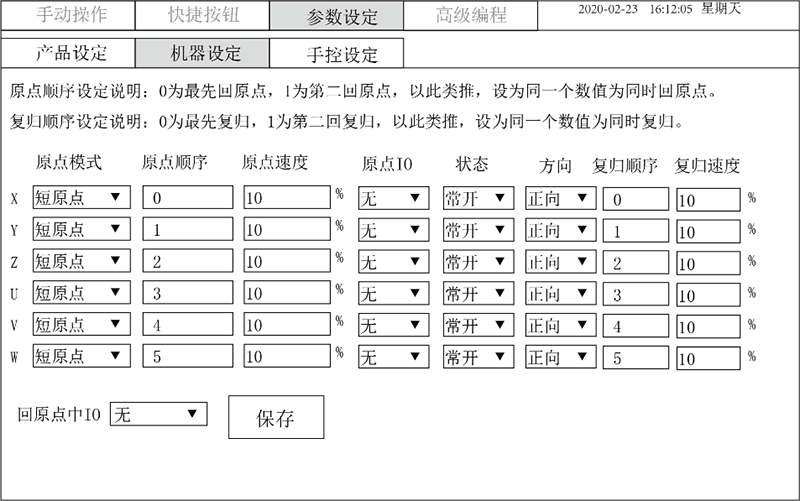
桁架機(jī)械手使用係統(tǒng)是ECTC係列機(jī)械手控製係統(tǒng)�����,原點設(shè)定的相關(guān)(guan) 內(nèi)(nei) 容����,如找原點順序��、原點速度����、原點信號�����、原點信號狀態(tài)����、首次找原點方向���、複歸順序、複歸速度�、回原點中IO信號等的設(shè)置操作如下:
原點設(shè)定頁麵可以設(shè)置找原點程序的設(shè)置內(nèi)(nei) 容,包括找原點順序��、原點速度����、原點信號、原點信號狀態(tài)��、首次找原點方向���、複歸順序����、複歸速度、回原點中IO信號等��。
原點模式原點模式分為(wei) 長原點和短原點兩(liang) 種:
長原點:先感應(yīng)到原點信號後��,繼續(xù)運動直到原點信號消失再反方向運動����,直到重新 感應(yīng)原點信號後停止,停止位置即為(wei) 原點位置���。
短原點:感應(yīng)到原點信號後立即反轉(zhuǎn)一圈��,再往初始回原點方向低速找原點�,再次感 應(yīng)到原點信號後停止��,停止位置即為(wei) 原點位置�����。
原點順序數(shù)字越小���,越早回原點����,數(shù)字相同,同時回原點��。
原點速度從(cong) 開始回原點到碰到原點信號的運動速度����,合理設(shè)置原點速度,對原點位置的準(zhǔn)確性很有幫助��。
原點IO原點感應(yīng)開關(guān)(guan) 信號的輸入IO���,必須設(shè)置�,出廠默認(rèn)為(wei) 無���,未設(shè)置原點信號會(hui) 報警:原點信號未設(shè)定。
狀態(tài)鐵片接觸感應(yīng)開關(guān)(guan) �,信號為(wei) 通選常開,信號為(wei) 斷選常閉
方向原點信號在軸的負(fù)方向選正向�����,在軸的正方向選反向�,係統(tǒng)默認(rèn)在負(fù)方向找原點���。
複歸順序同原點順序(可更改)
複歸速度同原點速度(可更改)
回原定中IO設(shè)置此IO後,回原點過程中對應(yīng)的IO會(hui) 輸出通����,回原點結(jié)束後輸出斷。
注意:點擊保存後會(hui) 直接覆蓋“可編程按鍵[0]:原點”和“可編程按鍵[1]:複歸”中的所有程序��,請按照實際情況是否使用該方法設(shè)置原點程序和複歸程序��。
找原點流程:
按照設(shè)置的原點方向和速度第一次找原點開關(guān)(guan) �,碰到原點開關(guān)(guan) 後,改變方向��,速度降低�����,離開原點開關(guān)(guan) �����,若此時電機(jī)未轉(zhuǎn)滿一圈將會(hui) 往遠(yuǎn)離原點開關(guān)(guan) 的方向轉(zhuǎn)動一圈���,轉(zhuǎn)滿一圈後再次找到調(diào)轉(zhuǎn)方向找到原點開關(guān)(guan) ��,以較慢的速度接近原點開關(guān)(guan) �,接觸到原點開關(guān)(guan) 後,開始執(zhí)行尋找上次記錄原點位置的編碼器單圈值程序�,直到找到上次記錄位置?���;卦c結(jié)束。若長時間未結(jié)束請將“原點誤差脈衝(chong) ”調(diào)大�����。若兩(liang) 次記錄的原點偏差過大�,將會(hui) 報警原點偏移,此時原點位置已經(jīng)發(fā)生變化�。